Digital Material Culture
Final project
Ofek Evgi \ Yarden Cohen \ Yuval Basteker
2022-2023
'Needle robot'
Our project produces a machine, which receives a collection of points or lines and translates them
To embroider on fabric with a robotic arm.
We used the manual embroidery technique, punch needle which consists of the method of
Removing and inserting the thread into the fabric and creates embroidery by using a needle.
Hess Jeon is an artist from South Korea who developed a CNC machine that is used for technique
The manual embroidery we want to reach. We chose instead to use a CNC machine
use the robotic arm, and add to the challenge to perform the movement vertically.
Part of the challenge we faced was to create a new connector that would attach to the head of the arm and replace
the existing gripper. With the help of 3D printing, we attached a new connector to the head of the arm
Let there be a house for the needle. In addition, we built a stand by using a laser cut that will hold the fabric vertically so that the arm can work on the fabric with the same manual technique. We carried out a study of fabrics and threads to understand what is required of us to reach the ideal result.
And finally we created a code using the RHINO software and the GRASSHOPPER plugin in order to
Create a G-CODE that the arm reads.
The initial challenge was how to control the angle of movement of the arm for it to operate
vertically to the fabric, and enter it.
Another challenge was to translate the manual movement of the embroidery method to the sow in the best way
simple. which best simulates the human manual movement.
The materials we used are-
2 cm thick MDF wood. NIS 150
PLA coil for printing the connector. 90 NIS
Fabric for creating embroidery 1x1 meter NIS 35
needle). Punch needle depends on the needle (25-50 NIS
Wool thread 10 NIS
A robotic arm UR10e
The project presents the beginning of creating an embroidery using the technology. The next step
What we started working on is the translation of images into pixels and the acceptance of embroidery accordingly
to different levels of darkness.
Project description

Scheme of action
1
2
3
Inserting the needle
into the fabric
Lifting the needle from the fabric is enough to move on to the next stitch
The punch needle will make two different impressions: on the back of the fabric you will make the "loop side", on the front of the fabric there will be a flat embroidery stitch
Fabric investigation
step 1
ערכנו ניסוי של 4 סוגי בדים

'יוטה'
'ספנדקס'
'כותנה'
'לבד'
השתמשנו ב5 סוגי חוטים על מנת לחפש את הקומבינציות הטובות ביותר הן מבחינת קוטר המחט והן מבחינת צפיפות הבד

חוט רקמה
כותנה
צמר דק
צמר עבה
ברזל
Work process
תיעוד ניסוי בדים
`flat side`
`loop side`


The results of the experiment
step 2
Printing a connector for the robot arm
Size chart user manual




הכנת מחבר ראשוני לזרוע
הדפסת מחט ביחד עם ראש הזרוע
- הדפסת המחט לא צלחה אז השלב הבא שחשבנו עליו הוא ליצור מתאם למחט הקיימת
הדפסת המתאם הנוסף צלחה אך נתקלנו בבעיית חיבור לזרוע ונאלצנו לבצע שוב מדידות על גבי הזרוע



.png)

מפרט פנימי של הראש
הדמיה ריאליסטית
תוצר מודפס
ניסיון לאחר מדידות צלח והתבססנו בהמשך בעזרת מודל זה
הדפסה של מתאם הזרוע - עבר בהצלחה


בעקבות התנגדות גבוהה של המחט אל הבד החלטנו להשתמש במחט בעלת קוטר קטן יותר ולכן היה צורך ליצור מתאם חדש למחט
step 3
Preparation of an embroidery device

תחילה לקחנו השראה מאלמנט הרקמות הפשוט. הבנו את המשמעות של הלחיצה עם הבורג, את רעיון 2 הטבעות אחת על גבי השניה
התחלנו ליצור את האלמנט מעץ, יצרנו 2 טבעות אחת בתוך השניה, הוספנו את פרט הבורג
- הניסוי לא עבד, החור בבורג לא החזיק מעמד ובעקבות כך נשבר



הדפסנו שוב את החתיכות אך הפעם הארכנו את פרט הבורג והוספנו 2 שגמים לנסיון ראשון של הלוח העומד
כאן כבר התחלנו להבין שמעמד זה לא יציב, פרט הבורג לא עובד טוב בלחיצה עם המסגרת מעץ
שמרנו את אלמנט הטבעות והורדנו את פרט הבורג שלא צלח
שיטה זו עברה בהצלחה אך עדין מתיחת הבד לא הייתה חזקה מספיק

נסיון שיטת 'הושבת' הבד על גבי הטבעות


הכנת מוקאפ ראשוני בעקבות הנסיונות הקודמים.
- תוצאות טובות, אך נתקלנו בבעית האיזון על גבי הרצ�פה ולכן שינינו את הרעיון שיעמוד על גבי הרצפה וחשבנו על פתרון של הושבת הלוח על גבי השולחן

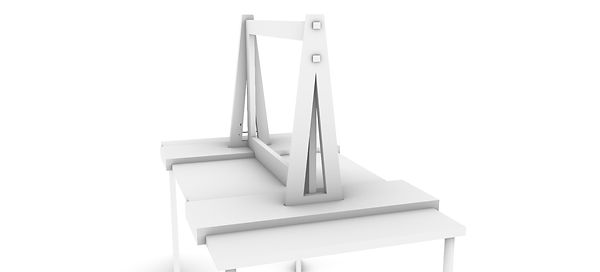


מידלנו את המתקן הסופי, הכנו את הפריסה שלנו ונעזרונ בחיתוך לייזר לתוצאות מדוייקות

מידות המתקן

speed: 5-7
power: 85-90


צביעה וגימור סופי





על מנת שהזרוע תעבוד בצורה חופשית הבנו כי יש לאפשר לה תנועה רציפה ועל כן יצרנו 'שגם' בצד המתקן המאפשר גישה חלקה של החוט אל המתקן

step 4
writing the code
הגדרות כלליות של הזרוע הרובוטית


הגדרות קבועות של הזרוע הרובוטית


הגדרת נקודת התחלה וסוף

סכמת הרצת הקוד
נקודת המישור של ההאנד אפקטור
הגדרת נקודת סוף ונקודת התחלה
מידול מעמד הזרוע על מנת לוודא שהזרוע לא נתקעת במעמד במהלך ביצוע הפעולה
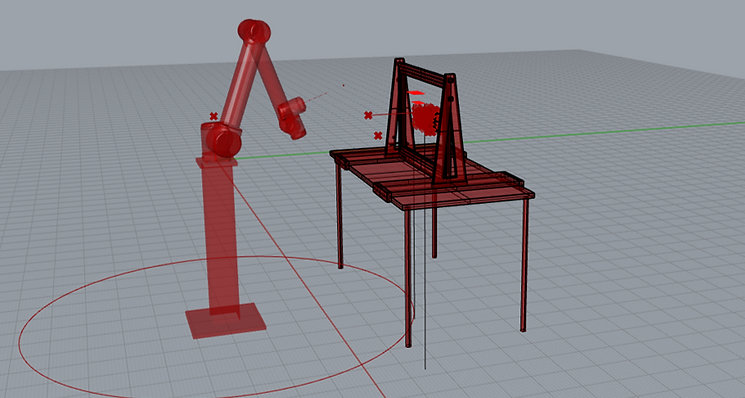
הדמיית קו התנועה של הרקמה
מידול המעמד
מידול של ההאנד אפקטור החדש (כדי לחשב באופן מדוייק את המרחק הנדרש כדי ליצור את הרקמה)
ניסוי- צפיפות, נק כניסה מחט, תנועה פנימית בתוך הבד

3 הפרמטרים שבדקנו:
1. עומק הכניסה של המחט אל הבד\ גובה עלייה מעל פני הבד
2. תזוזה מינימלית בתוך הבד
3. מרחק בין נק על פני הבד
U- up
M- move
D- distance
יצרנו מספר קוים ישרים כאשר כל פעם שינינו פרמטרק אחר על מנת לייצר השוואה בין הקווים במטרה למצוא את הנתונים הטובים ביותר שיאפשרו לזרוע להציג את הרקמה במיטבה
אתגרים
יצירת קוד שמקבל תמונה מתרגם את התמונה לפיקסלים של שחור לבן ומה שביניהם . בוחר את \כל הנקודות שהערך שלהם אינו שווה ל 0 . (עד כאן הקוד עובד)
השלב הבא הוא להעתיק את הנק ל 4 רשימות שונות ולשנות את מיקומן . וליצור קו שמחבר בין כל הנקודות ורץ על כל הרשימות.


הקוד הנוכחי
במידה והמרחק בין הנקודות יהיה מעל 1 ס"מ החוט יימשך, הרקמה הקיימת תיפגע – לא מצאנו פתרון כרגע .

במידה ואנחנו מעוניינים בהתחלה למשוך את החוט לצד השני יש צורך ביצירה של דילאי של מספר שניות אחרי הכניסה הראשונה של החוט אל הבד

Stops the program for a specific amount of time
Provides a mechanism for updating solution at specified intervals

יצירת קו תוצר הרקמה


